Robotic research group Robo@FIT
Robotic research group Robo@FIT
Robotic research group at FIT focuses on the development of advanced methods of autonomous intelligent systems and mobile platforms, processing and fusion of sensory data, creating dynamic 3D models of the environment, intelligent decisions and mission planning, knowledge management, multi-agent systems and advanced human-robot interaction systems.
Research interests
- Sensory data processing and fusion
- Object detection and classification
- Localization and mapping
- 3D environment modelling
- Simulations and Visualizations
- Advanced and assistive user interfaces
- Augmented reality, Virtual reality
- Collaborative robotics
Current research topics
Robotic research group at FIT focuses is currently engaged in research into human-robot interaction, especially in shared-space collaborative environments in the programming, parametrization, or revision of production procedures using augmented reality.
Significant results
- ARCOR2 - framework for simplified robot programming
- Spatial Augmented Reality User Interface for Collaborative Robot
- Teleoperating Assistive Robots: A Novel User Interface for Remote Manipulation and Navigation Relying on Semi-Autonomy and Global 3D Environment Mapping
- Collaborative robot 2.0: cognition of the work environment, augmented reality-based user interface, simple deployment and reconfiguration
Cooperation
In the area of safe human-robot interaction, we offer collaboration to solve the tasks of programming and inspection of collaborative robot procedures in Industry 4.0 with the use of mobile devices and augmented reality. An example is the recent collaboration with ABB (see a video).
More information
- On October 29, 2014, Robo@FIT group organized ROS workshop 2015 - annual seminar of practical experiences with ROS platform.
- On October 29, 2014, Robo@FIT group organized ROS workshop 2014 - annual seminar of practical experiences with ROS platform.
- On May 22, 2014, the Faculty of Information Technology BUT organized the Robo@FIT Open Day event, which showcased robotic platforms - from the ground to the air - along with sample applications on these platforms, including laboratory equipment and selected results of the robotic research group and student works.
The event was attended by over 50 visitors, among whom were also students from other Brno universities, representatives of companies and the general public. - Getting started in Robotics&ROS - second workshop providing practical basics to ROS platform
Robotic Lab
The robot lab is made up of several detached workplaces and is equipped with mobile robots for land and air movement in both indoor and outdoor environments. There are also laboratories for the development of platforms and electronics, such as the development of the RUDA rescue robot and the laboratory for industrial manipulation for experiments with the industrial manipulator MELFA. The equipment of the laboratory enables to study in the areas of data fusion from different sensors (image, depth, inertial, etc.), measurements and reconstructions in 3D space, planning and navigation of ground and air robots, human interaction with robot, validation of perception technologies in robotic or supervisory systems, etc.
Robotic lab equipment:
- PR2 is robotic research and development platform that combines the mobility to navigate human environments and the dexterity to grasp and manipulate objects in those environments.
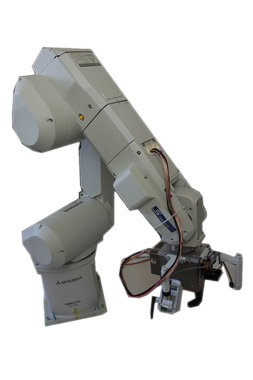
- MELFA RV6-SL robotic manipulator workcell. Example of tasks is collecting of known objects that are scattered on the floor. The robot finds them with a sensor, plans motion to collect them and executes the motion.

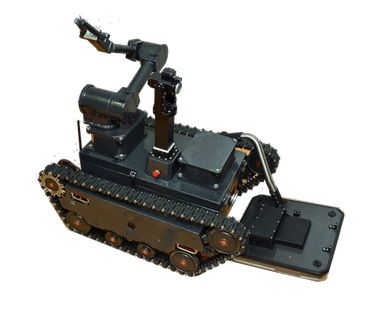
- Rescue Robot was designed by FIT researchers for search of human beings in damaged houses, debris or avalanches. It is remotely controlled by an operator endowed with a small amount of intelligence to protect itself and to find way back in case of loss of communication. Its modular design of the body and electronics allows full support of the operator and choice of the appropriate set of sensors for the given task.
- Toad platform is outdoor platform with novel 3D Lidar technology. The Toad is focused on development of large-scale SLAM, 3D environment model reconstruction, navigation and exploration.
- Pioneer 3-AT,http://www.mobilerobots.com/Libraries/Downloads/Pioneer3AT-P3AT-RevA.sflb.ashx
- Lidar, Velodyne HD Lidar HDL-32E,http://velodynelidar.com/lidar/hdlproducts/hdl32e.aspx
- high-performance, miniature GPS-Aided Inertial Navigation System (GPS/INS), IMU+GPS 3DM-GX3-45-USB-SK1,http://www.zse.de/index.cfm/content/products/gr_id/844/
- Lidar, Hokuyo UTM-30LX, http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
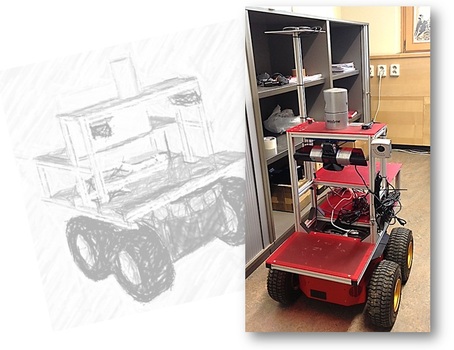
- Edward (or Ed) is platform assembled for development particular service robotic tasks such as social interaction, transportation, person-following, etc.
- PatrolBot,http://www.mobilerobots.com/Libraries/Downloads/PatrolBot-PTLB-RevA.sflb.ashx
- Lidar, Hokuyo UTM-30LX, http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
- ASUS Xtion Pro, Kinect
- Lenovo All-in-One touch screen

- Tyra is UAV platform for large-scale environment mapping, monitoring, inspection, etc.
-
- UAV, AscTec Pelican,http://www.asctec.de/downloads/flyer/AscTec-UNI-Flyer-2011-No-08_Infos-only.pdf

- UAV, AscTec Pelican,http://www.asctec.de/downloads/flyer/AscTec-UNI-Flyer-2011-No-08_Infos-only.pdf
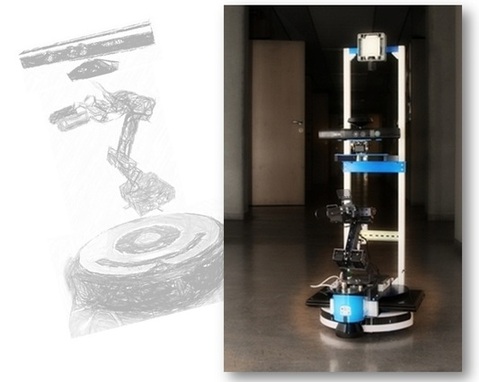
- TurtleBut2 (or TB2) is experimental laboratory platform designed to service robotics task in indoor environment.
- TurtleBot, http://turtlebot.com/
- Kinect
- Lidar, Hokuyo UTM-30LX, http://www.hokuyo-aut.jp/02sensor/07scanner/utm_30lx.html
- WiFi AP - TP-LINK TL-WR1043ND,http://www.alza.cz/tp-link-tew-671br-d235410.htm
- Low-cost IMU, Pololu CHR-UM6 Orientation Sensor, http://www.pololu.com/catalog/product/1255
- Manipulator, CrustCrowler AX-18A,http://www.crustcrawler.com/products/AX-18F%20Smart%20Robotic%20Arm/
- Joystick - Sony PS3 DualShock 3,http://www.alza.cz/bezdratovy-vibracni-gamepad-sony-dualshock-3-pro-ps3-cerny-black-d85804.htm#foto
- The robotic lab is further equiped by wide range of tools and devices:
- fully equipped hardware development working place with a modern tools
- common cameras and radars, Kinects, stereo-cameras
- Lidar - SICK LMS 100
- HRI devices (iPads, ThinkPad Tablets, widescreen multi-touch displays ELO 4200L (42") or NEC V-Touch 3210w (32"))
- VR/AR tools (ARvision-3D, i-glasses PC 3D PRO, eMagin Z800 3DVisor, CyberGlove, CyberTouch, Flock of Birds etc.), Microsoft HoloLens