Pose Estimation from Line Correspondences
using Direct Linear Transformation
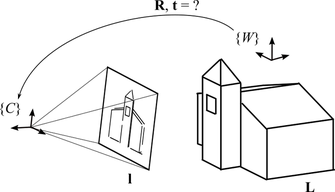
Pose estimation is the task of determining the relative position and orientation of a camera and an object to each other in 3D space. To estimate the pose, correspondences between known real world 3D features and their 2D counterparts in the image plane of the camera are needed. The features can be, for example, points, lines, or combinations of both. If lines are used, the problem is known as the Perspective-n-Line (PnL) problem. We focus on cases with many lines, which can be efficiently solved by methods using linear formulation of PnL. We propose a novel method DLT-Combined-Lines based on the Direct Linear Transformation (DLT) algorithm.
The method is described in our paper Absolute Pose Estimation from Line Correspondences using Direct Linear Transformation (PDF, post-print also available at arXiv.org).
Matlab code is available for download: DLT-based-PnL_code.zip [4.7 MB].
Supplementary material is available as well: DLT-based-PnL_supplementary.pdf [3.9 MB].
Abstract:
This work is concerned with camera pose estimation from correspondences of 3D/2D lines, i. e. with the Perspective-n-Line (PnL) problem. We focus on large line sets, which can be efficiently solved by methods using linear formulation of PnL. We propose a novel method "DLT-Combined-Lines" based on the Direct Linear Transformation (DLT) algorithm, which benefits from a new combination of two existing DLT methods for pose estimation. The method represents 2D structure by lines, and 3D structure by both points and lines. The redundant 3D information reduces the minimum required line correspondences to 5. A cornerstone of the method is a combined projection matrix estimated by the DLT algorithm. It contains multiple estimates of camera rotation and translation, which can be recovered after enforcing constraints of the matrix. Multiplicity of the estimates is exploited to improve the accuracy of the proposed method. For large line sets (10 and more), the method is comparable to the state-of-theart in accuracy of orientation estimation. It achieves state-of-the-art accuracy in estimation of camera position and it yields the smallest reprojection error under strong image noise. The method achieves top-3 results on real world data. The proposed method is also highly computationally effective, estimating the pose of 1000 lines in 12 ms on a desktop computer.
If you use the Matlab code, please cite our paper.
BibTex entry:
@ARTICLE{
author = {Bronislav P{\v{r}}ibyl and Pavel Zem{\v{c}}{\'{i}}k and
Martin {\v{C}}ad{\'{i}}k},
title = {Absolute Pose Estimation from Line Correspondences using
Direct Linear Transformation},
journal = {Computer Vision and Image Understanding},
year = {2017},
ISSN = {1077-3142},
language = {english},
doi = {10.1016/j.cviu.2017.05.002},
url = {https://doi.org/10.1016/j.cviu.2017.05.002}
}
Our earlier paper about the DLT-Plücker-Lines method from BMVC 2015 is available here.
Author of this webpage: Bronislav Přibyl